Flexible Loop Robot
Wing-Sum Law, Sofia Wyetzner, and Sean Follmer
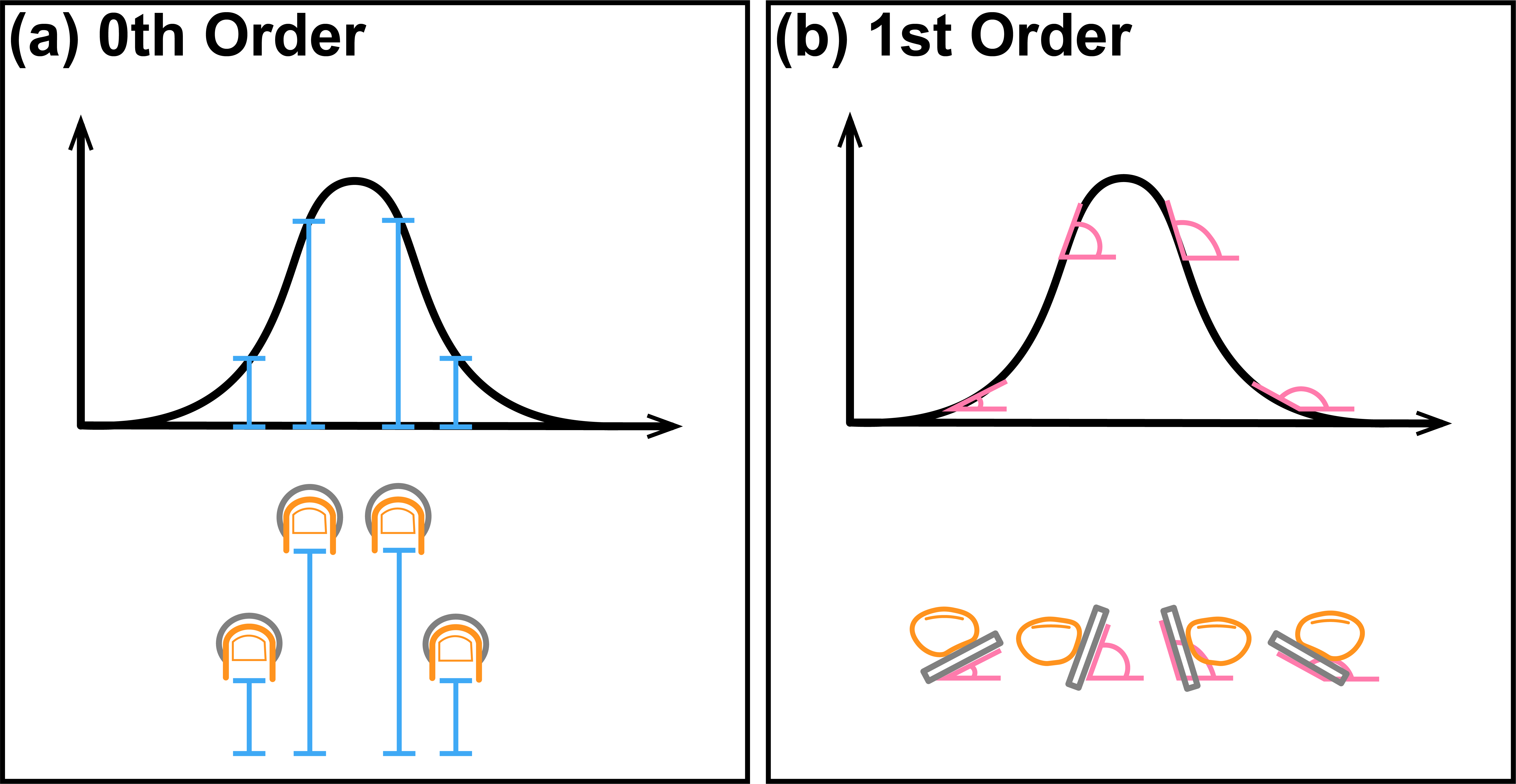
Many robots, such as those found in manufacturing facilities, are designed for well-defined environments where the conditions of operation are known in advance. However, for many tasks it is necessary that a robot can adapt to its surroundings. We use the inherent shape change ability of flexible loops to make a shape-changing, crawling robot that is capable of steering and handling multiple terrains.
Preprint | In Review